





")


Talán intelligens robotkutya? Mesterséges intelligencia segítségével amerikai kutatók és mérnökök a marsi lávabarlangok vizsgálatára egy leginkább kutyára emlékeztető robotot fejlesztettek ki.
A Mars körüli pályáról a bolygó felszínét nagy felbontású felvételek segítségével térképező és tanulmányozó NASA Mars Odyssey és Mars Global Surveyor, majd a Mars Reconnaissance Orbiter (MRO) szondák felvételein kör vagy körhöz közeli alakú sötét foltokat találtak még 2007-ben, amelyekről már akkor kiderült, hogy felszín alatti üregek nyílásai.
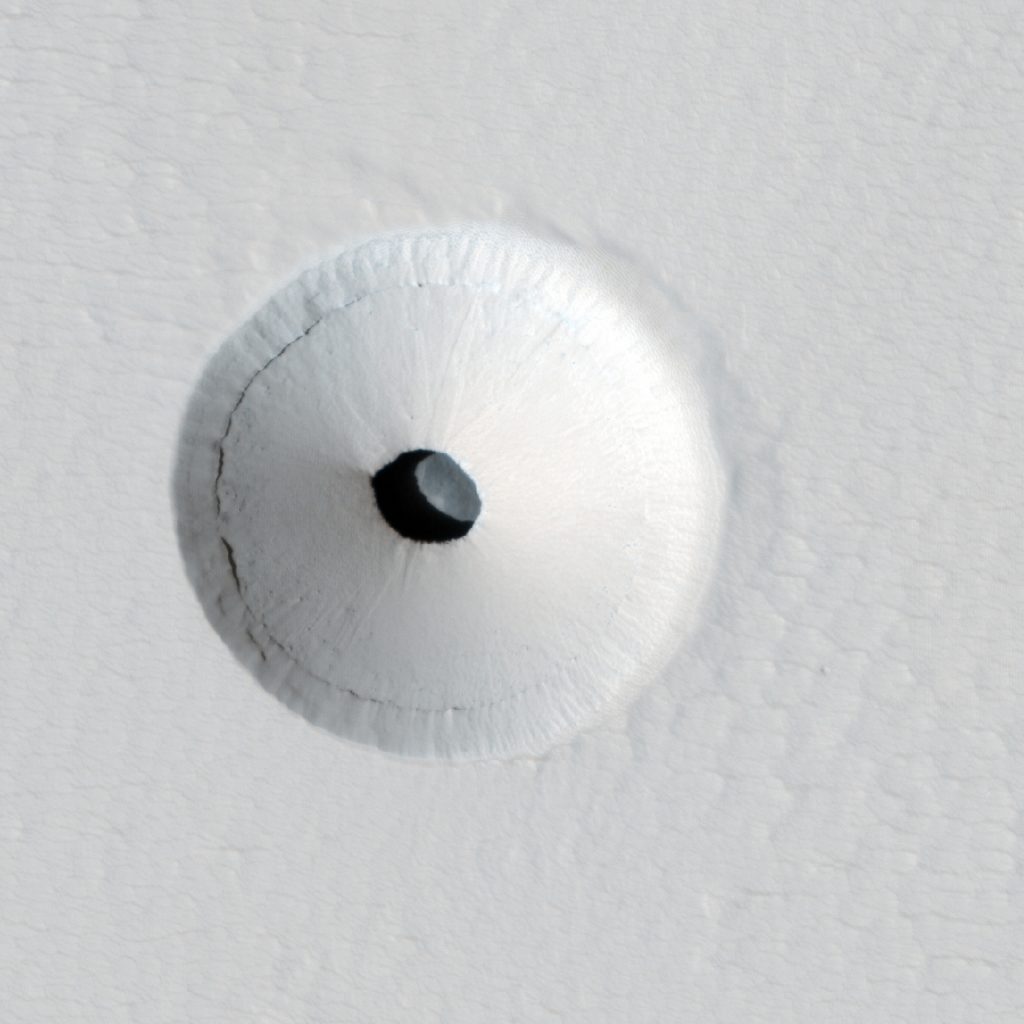
Az alábbi kép a marsi lávabarlangok bejáratára mutat egy példát. A felvételt a Mars Reconnaissance Orbiter a HiRES (High Resolution Imaging Science Experiment) nagyfelbontású kamerájával készítette a Pavonis Mons területén levő lávabarlang beszakadt tetejéről még 2011-ben. A mintegy 35 méter átmérőjű lyukon (geológiában ez az ún. „skylight” nyílás) a fény be tud jutni a barlangba a lyuk alatti területre. A mérések szerint a lyuk alatt a barlang felszínén kb. 62 méter magas törmelékhalom keletkezett az egykori lávacsatorna beszakadásakor, a lyuk pereme, valamint a törmelékhalom teteje között pedig mintegy 28 méter van, ami azt jelenti, hogy a lyuk alatt a felszínig összesen 90 méter az üreg mélysége.
A vörös bolygó körül keringő űrszondák nagy felbontású felvételeinek köszönhetően ma már mintegy ezer lávabarlangot ismerünk a Marson. A lávabarlangok azért is fontosak lehetnek, mert a felszín alá nem tudnak lehatolni a kozmikus sugarak és a Nap ultraibolya sugárzása, illetve a barlangfalakon a hőmérséklet kiegyenlítettebb, a felszínhez képest jóval kisebb odalent a hőingadozás, továbbá a meteoroktól is védelmet nyújtanak a barlangok. Az űrhajósok menedéket, lakóhelyet találhatnak bennük, és a készletek számára is védelmet nyújthatnak a felszín alatti nagyobb barlangok, lávacsatornák. Nagyon fontos lenne azt is megtudni, hogy a lávabarlangok megőrizték-e a Marson egykor talán létezett élet valamilyen nyomát.

A kérdés az, hogyan lehet a marsi barlangokat kutatni ott könnyen eligazodó és mozgó robottal? Vajon kerekes marsjárók alkalmasak lennének-e erre? Az eddigi tapasztalatok szerint a kerekes marsfelszíni roverek mozgása során komoly problémák adódtak. Ugyanis a marsjárók, a kis Pathfinder (Sojourner), majd a nagyobb Spirit, Opportunity, valamint Curiosity roverek kerekeken mozogtak, illetve most a Mars felé úton levő Perseverance rover kerekek segítségével gördül, kapaszkodik majd a vörös bolygó egyenetlen, rögös, lejtős-emelkedős felszínén, ami már eddig is nagy kihívások elé állította ezeket a járműveket.
A megoldás az újszerű marsjáró robotokra már meg is született. Az Amerikai Geofizikai Egyesület (American Geophysical Union, AGU) 2020. decemberi éves közgyűlésén a NASA/JPL-Caltech és a vele együttműködő Boston Dynamics cég kutatói és mérnökei bemutatták a „marskutyákat”, amelyek valójában szuperintelligens robotok, a négylábú állatok közül ténylegesen leginkább a kutyákra hasonlító kialakítással és mozgással. Felismerik és legyőzik az akadályokat, a szélsőséges, kedvezőtlen hőmérsékleti viszonyokat, az alternatív lehetőségek közül pedig a legjobbat választják ki.
Az alábbi két képen egy barlangban, felszín alatti alagútban látható a kifejlesztett eszköz.


A jövő marskutatásaihoz, különösen pedig a marsi barlangok kutatására legalkalmasabb robotkutyát és képességeit az alábbi pár videó mutatja be.
A marsi barlangokban a robotkutya igen ügyesen mozog majd. Az alábbi videó a robot barlangokban mutatott mozgását és a tervezett kutatási tevékenységet mutatja be.
Egyébként még további technikai megoldások kifejlesztése szükséges ahhoz, hogy a robot lejusson egy lávabarlangba, mert a barlangbejáratok nem lejtősek, amelyeken könnyen le lehetne sétálni vagy ereszkedni.
A most kifejlesztett és bemutatott négylábú robotok a fejlesztők reményei szerint ügyesebben fognak mozogni a Mars felszínén, mint az eddig alkalmazott kerekes marsjárók. Így valószínűleg a NASA programjaiban is megjelenhetnek az eszközök és a jövőben akár önállóan vagy űrhajósok hűséges útitársaként segíthetik a Mars kutatását. Különösen a felszín alatti barlangok felderítésében, de akár egy felszín alatti bázis kialakításában is közreműködhetnek.
A hír a GINOP-2.3.2-15-2016-00003 “Kozmikus hatások és kockázatok” projekt témakörében jelent meg.
Források:
- Meet the robot ‘dog’ NASA is sending to Mars (Twitter, 2021.01.11.)
- Meet Au-Spot, the AI robot dog that’s training to explore caves on Mars (SPACE.COM, 2020.01.07.)
- The Robo-Dog Spot as a cave explorer. Such robots will find us a home on the Moon and Mars – NeeWS (tekdeeps.com, 2020.01.06.)
- Meet Au-Spot, the AI robot dog that’s training to explore caves on Mars (Live Science, 2020.12.17.)
Kapcsolódó internetes oldalak:
- The 1,000 Caves of Mars (Scientific American, 2020.03.09.)
- Possible lava tube (SETI Institute, Mars Institute, F4Unzi, Twitter, 2018..01.18.)
- A Giant Cave on a Giant Volcano (MRO/HiRES, 2011)
- Éjjel melegebb, nappal hidegebb. Mi az? (Űrvilág, 2007.09.24.)
- Megoldódott a marsi fekete lyuk rejtélye (MCSE hr, 2007.09.04.)
- Fekete lyuk a Marson (MCSE hír, 2007.05.28.)

{kind=link}